AIAA Fixed Wing Drone Junior Project

AIAA Fixed-Wing Drone Project — Junior Project (x96)
For my x96 Junior Project at the University of Hawaiʻi at Mānoa, I served as the lead software developer for the AIAA fixed-wing drone team. My primary responsibility was the development and integration of autonomous flight logic using ArduPilot, with a focus on reliability, repeatability, and safe operation during flight testing and deployment scenarios.
A significant portion of my work involved automating the aircraft’s landing path, including tuning guidance and control parameters to ensure consistent and accurate autonomous landings. In addition, I designed and implemented software support for the release mechanism that separates the drone from the main glider, coordinating timing, control logic, and safety constraints to ensure a clean and predictable release during flight operations.
Throughout the semester, I delivered multiple technical presentations documenting progress, challenges, and system performance to faculty and peers. I also participated in numerous field testing days, where I collaborated closely with other team members to tune flight parameters, validate system behavior, and iterate on software changes based on real-world performance data.
Team and Field Testing

AIAA Fixed-Wing Drone Project team during a field testing session.
Autonomous Flight Path
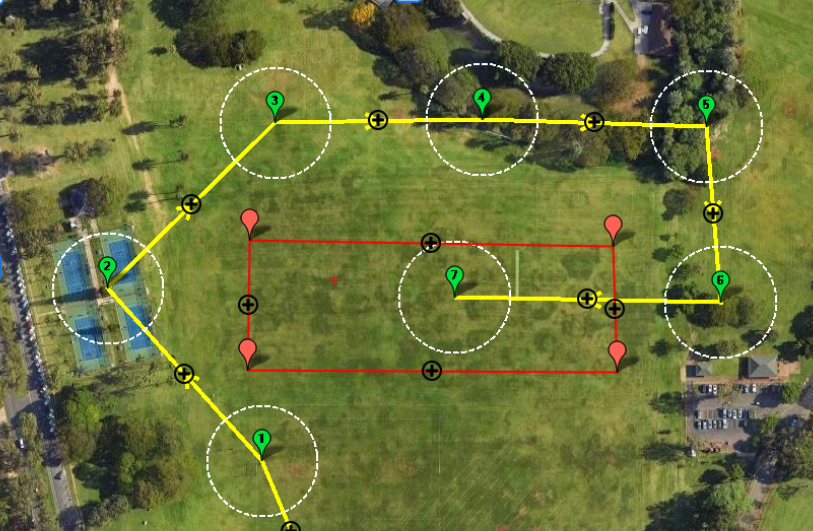
ArduPilot visualization of the fixed-wing aircraft’s autonomous flight and landing path.